Projects & Theses
Below you find a collection of BSc and MSc projects and theses that can be carried out within the MaP community.
Internship / Side job: Assembly & Production (Diagnostics Hardware)

Diaxxo is seeking a motivated intern to support the assembly and production of diagnostic devices and cartridges at our labs in Dietlikon/Zürich. Join our dynamic startup and work hands-on with cutting-edge PCR technology.
Keywords
Diagnostics • PCR • Biotechnology • Innovation • Start-up • Viral Detection • Quality Control • Device Assembly • Healthcare • Hardware • Electrical
Labels
Collaboration , Internship , Lab Practice
Description
Goal
Contact Details
More information
Published since: 2026-07-21 , Earliest start: 2026-06-01 , Latest end: 2026-12-31
Organization Functional Materials Laboratory
Hosts Gregorini Michele
Topics Engineering and Technology
Development of a High-Precision Liquid Dispensing Module for Automated Molecular Diagnostics
Diaxxo, an ETH Zürich spin-off, is developing advanced automation technologies for its Point-of-Care PCR platform, diaxxoCare. This project focuses on the development of an in-house liquid dispensing module capable of pipetting variable liquid volumes with high precision and repeatability. The student will support the design, prototyping, integration, and testing of a compact dispensing system suitable for automated diagnostic workflows. Depending on the student’s background, the project may include mechanical design, fluidics, electronics, sensor integration, control algorithms, embedded firmware, and performance validation. The final goal is to deliver a working prototype and test data supporting future integration into Diaxxo’s commercial device platform.
Keywords
Point-of-Care diagnostics; PCR automation; liquid handling; precision dispensing; pipetting module; fluidics; embedded systems; mechatronics; sensor integration; medical device development; prototyping; automated diagnostics.
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-21 , Earliest start: 2026-06-01 , Latest end: 2026-12-31
Organization Functional Materials Laboratory
Hosts Gregorini Michele
Topics Engineering and Technology
Experimental Testing and Cartridge Manufacturing Support for Molecular Diagnostics
Diaxxo, an ETH Zürich spin-off, is looking for a motivated student or intern to support wet-lab testing, data analysis, and cartridge manufacturing activities for its automated Point-of-Care PCR platform, diaxxoCare. The work will include preparing and performing experimental runs, analyzing PCR and sample-preparation results, supporting the production and quality control of single-use diagnostic cartridges, and documenting findings in a structured way. This hands-on role is ideal for a student interested in molecular diagnostics, laboratory work, manufacturing processes, and applied product development in a start-up environment.
Keywords
Point-of-Care diagnostics; PCR; qPCR; molecular diagnostics; wet lab; experimental testing; assay validation; sample preparation; cartridge manufacturing; consumable production; quality control; data analysis; automated diagnostics; biotechnology; veterinary diagnostics.
Labels
Internship , Lab Practice , Student Assistant / HiWi
Description
Goal
Contact Details
More information
Published since: 2026-07-21 , Earliest start: 2026-07-01 , Latest end: 2026-12-31
Organization Functional Materials Laboratory
Hosts Gregorini Michele
Topics Engineering and Technology , Chemistry , Biology
Disposable Scoop-Pouch for Leg-Assisted Regolith Sampling

This project develops and experimentally validates a disposable thin-sheet scoop-pouch gripper for robust, contamination-free, leg-assisted regolith collection and storage.
Keywords
legged robot, mechanism, hardware, gripper, end-effector, space, planetary exploration, robotics,
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-07-21
Organization Robotic Systems Lab
Hosts Tanaka Yusuke
Topics Engineering and Technology
High-Speed PCB Design for Neural Recording Systems

This project focuses on the development of a neural recording system for in vivo neuroscience experiments. Building upon an existing in vitro electrophysiology platform based on state-of-the-art CMOS microelectrode array technology, the goal is to design and implement the electronic hardware required to transform the system into a compact and robust in vivo device. The project involves high-speed PCB design, mixed-signal system integration, data communication interfaces, and hardware characterization. The work is highly hands-on and offers exposure to advanced neuroscience instrumentation and cutting-edge microelectronics.
Keywords
High-speed PCB design; Altium Designer; Mixed-signal electronics; Neural recording; Neurotechnology; CMOS microelectrode arrays; In vivo electrophysiology; Hardware development; System integration; High-speed interfaces; Signal integrity; Data acquisition; Oscilloscope measurements; Electronics prototyping; Biomedical instrumentation
Labels
Semester Project , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Contact Details
More information
Published since: 2026-07-20 , Earliest start: 2026-09-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Engineering and Technology
Automated Surface Finishing for FDM 3D Printing: Tool Design and Closed-Loop Optimization for Side Ironing

We can use ironing with a hot metal cylinder to flatten out the surface layer lines in FDM 3D printed objects. This has been demonstrated but finding the right process parameters (temperature, speed, etc.) requires many experiments. We want you to develop an automated tuning system that prints, post processes and evaluates everything in one printer. This work combines hard- and software development from low to high level with experimentation.
Keywords
FDM, automated tuning, Prusa XL, G-code, ironing, surface roughness, toolpath planning, closed-loop optimization
Labels
Semester Project , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
About pd|z
Contact Details
More information
Published since: 2026-07-20 , Earliest start: 2026-08-01
Organization pd|z Product Development Group Zurich
Hosts Stein Tom
Topics Engineering and Technology
Automatic Object-to-Marker Pose Estimation for Workflow Understanding

Understanding how tools and objects move and interact is important for automated workflow analysis and process documentation. Marker-based 6D pose estimation accurately measures an object’s position and orientation, but typically tracks only the attached marker rather than relevant object features. This project explores how state-of-the-art computer vision methods can automatically establish this relationship using only a few images or a short monocular video, reducing calibration effort and simplifying the integration of new objects.
Keywords
Computer Vision, 6D pose estimation, Tracking, Object tracking, Transformers, Calibration, Deep Learning, Few-shot learning, Workflow understanding
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-20 , Earliest start: 2026-08-01 , Latest end: 2027-02-01
Organization pd|z Product Development Group Zurich
Hosts Hogenkamp Maarten
Topics Information, Computing and Communication Sciences , Engineering and Technology
Exploring the Mechanoregulation of Bone Regeneration

In over 100 years, the remarkable ability of bone to adapt to its mechanical environment has been a source of scientific fascination. Bone regeneration has been shown to be highly dependent on the mechanical environment at the fracture site. It has been demonstrated that mechanical stimuli can either accelerate or impede regeneration. Despite the fundamental importance of the mechanical environment in influencing bone regeneration, the molecular mechanisms underlying this phenomenon are complex and poorly understood.
Keywords
Bone, Mechanobiology, Spatial transcriptomics, Gene expression, Finite element modelling, Image processing
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-19 , Earliest start: 2026-01-01 , Latest end: 2027-08-31
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Mathavan Neashan
Topics Medical and Health Sciences , Engineering and Technology
Development of a Semi-Empirical Simulation Framework for Ultrashort-Pulse Laser Drilling

This thesis develops a semi‑empirical simulation framework for ultrashort‑pulse laser ablation with a focus on laser drilling, balancing predictive capability and computational efficiency. The model is implemented in Python and experimentally validated to capture systematic parameter trends across process conditions, enabling future data‑driven optimization
Keywords
Simulation, modeling, system identification, parameter estimation, lasers
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-16 , Earliest start: 2026-07-16 , Latest end: 2026-12-31
Organization Advanced Manufacturing Laboratory
Hosts Schröder Nikolai
Topics Engineering and Technology
Cationic Hyperbranched Polymer/Collagen Based Porous Hydrogels for Dermal Tissue Engineering

In this project, we are developing 3D hydrogel networks with interconnected porous structures that emulate the native extracellular matrix(ECM). These hydrogels are designed to provide a three-dimensional microenvironment that supports cell adhesion, viability, proliferation, and tissue-specific functions. By tailoring the hydrogel composition, charge density, porosity, and mechanical properties, we aim to create biomimetic scaffolds that facilitate nutrient and oxygen transport while promoting cell infiltration and tissue regeneration. The resulting hydrogel platforms have potential applications as dermal scaffolds for wound healing and the development of chronic wound skin models.
Keywords
Hydrogels, hyperbranched polymers, collagen, tissue engineering
Labels
Semester Project
Description
Contact Details
More information
Published since: 2026-07-16
Organization Macromolecular Engineering Laboratory
Hosts Fan Yanmiao
Topics Engineering and Technology
Hardware Support HiWi

Gain hands-on experience at a robotics lab!
Keywords
Hardware, Design, Mechanics, CAD
Labels
Student Assistant / HiWi
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-07-15 , Earliest start: 2026-08-01
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Krasnova Elena
Topics Engineering and Technology
Lunar Dust Test Chamber – Hardware Development HiWi

Design and build the internal setup of a lunar dust testing chamber!
Keywords
hardware, space, robotics, moon, lunar, lunarleaper, design
Labels
Student Assistant / HiWi
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-07-15 , Earliest start: 2026-07-19
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Krasnova Elena
Topics Engineering and Technology
Building a Next-Generation Sensorized Dexterous Robotic Hand

This project aims to develop a new tendon-driven, anthropomorphic robotic hand intended to serve as a reproducible and extensible reference platform for academic research. Building on the Faive and open-source ORCA hands, the new system will target 19+ degrees of freedom, improved mechanical repeatability, per-joint impedance and force control, an actuated 2-DoF wrist, and integrated proprioceptive and tactile sensing. The student will take a leading role in the mechanical design, prototyping, testing, and iterative development of the fingers, hand, and wrist.
Keywords
Robotic hand, tendon-driven actuation, mechanical design, CAD, anthropomorphic robotics, proprioceptive sensing, tactile sensing
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-15 , Earliest start: 2026-08-10 , Latest end: 2027-06-30
Organization Soft Robotics Lab
Hosts Katzschmann Robert, Prof. Dr. , Kim Jaehoon
Topics Engineering and Technology
Student internship - Engineering Anisotropic Bacterial Cellulose Gels
Biological systems offer routes to build matter with controlled structure and function across scales. Among them, bacterial cellulose (BC) is uniquely attractive: produced as a fibrillar network with high purity and robust mechanical properties, it finds applications in diverse sectors including cosmetics, energy devices, and the biomedical industry. However, most research has targeted BC production yield and cost, while its microstructure, specifically fiber alignment, remains poorly understood and largely engineered post-production.
Keywords
- Hydrogel - Microscopy - Cellulose - Sustainability
Labels
Semester Project , Internship , Master Thesis , Master Project (D-MATL)
Description
Goal
Contact Details
More information
Published since: 2026-07-14 , Earliest start: 2026-09-01 , Latest end: 2026-12-31
Organization Complex Materials
Hosts Ansart Elise
Topics Engineering and Technology
Process Monitoring and Predictive Maintenance in Modern Manufacturing
Efficient and reliable manufacturing requires continuous insight into process and machine conditions. This student project focuses on process monitoring and predictive maintenance with an emphasis on tool wear and machine vibrations, aiming to improve productivity, precision, and equipment lifetime through data-driven monitoring and decision support.
Keywords
Process Monitoring; Predictive Maintenance; Tool Wear; Vibrations; Manufacturing Systems
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-10
Organization Computational Modelling of Materials in Manufacturing
Hosts Ostad Ali Akbari Vahid, Dr.
Topics Engineering and Technology
Intelligent Process Planning in Milling through Physics-Supported Reinforcement Learning
This project aims to contribute to transferring innovative academic developments in machining mechanics and artificial intelligence into a viable industrial solution. The objective is to elevate process planning and machining operations from experience-based, conservative production to science-backed, optimal production with clear economic and environmental benefits.
Keywords
Milling; Reinforcement Learning; Toolpath Planning; CNC; Process Optimization
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-10
Organization Computational Modelling of Materials in Manufacturing
Hosts Ostad Ali Akbari Vahid, Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
Deep Learning of Residual Physics For Soft Robot Simulation

Incorporating state-of-the-art deep learning approaches to augment conventional soft robotic simulations for a fast, accurate and useful simulation for real soft robots.
Keywords
Soft Robotics, Machine Learning, Physical Modeling, Simulation
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-08 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Michelis Mike , Katzschmann Robert, Prof. Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
Learning-based Control for Magnetic Levitation

This project aims to push the boundaries of remote magnetic levitation by targeting the simultaneous levitation of three distinct objects within the same workspace. Due to the highly non-linear nature of magnetic interactions, we will explore control techniques such as Model Predictive Control and learning-based methods. The project can be tailored to the student’s interests and background.
Keywords
magnetic levitation, learning-based control, machine learning, reinforcement learning
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Contact Details
More information
Published since: 2026-07-07 , Earliest start: 2026-09-01 , Latest end: 2027-04-30
Organization Multiscale Robotics Lab
Hosts Zughaibi Jasan
Topics Engineering and Technology
3D Bioprinting of Neurotized and Disease-Model Skeletal Muscle Tissues: Focus on Duchenne Muscular Dystrophy

This project aims to develop advanced 3D bioprinted skeletal muscle models with functional innervation, including neurotized healthy muscle tissues and in vitro models of Duchenne muscular dystrophy (DMD). Using state-of-the-art biofabrication strategies, the project will generate physiologically relevant muscle constructs suitable for functional characterization and pharmacological testing. These platforms are intended to support both fundamental research on neuromuscular interactions and translational studies for drug evaluation.
Keywords
3D bioprinting, skeletal muscle tissue, innervation, neuromuscular junctions, Duchenne muscular dystrophy, disease modeling, pharmacological testing, biofabrication, biomaterials, tissue engineering.
Labels
Semester Project , Master Thesis , Other specific labels , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-06 , Earliest start: 2026-07-01 , Latest end: 2027-02-28
Organization Soft Robotics Lab
Hosts Filippi Miriam
Topics Medical and Health Sciences , Engineering and Technology , Biology
Thermal and Structural Analysis of 3DP Building Components
Additive manufacturing has shown great potential in the building industry, enabling the fabrication of complex, customisable geometries that were previously impossible with conventional fabrication. Combining the advancement of this technology with ceramics, a fundamental building material with exceptional properties of durability, thermal stability and strength, functional properties of building components can be enhanced. This research investigates the potential of optimising the thermal and structural properties of ceramic 3D-printed components through a parametric design workflow that explores parameters of form, thickness and infill geometry.
Keywords
additive manufacturing, 3D printing, ceramics, structural simulation, thermal simulation, building performance
Labels
Semester Project , Master Thesis , Master in Integrated Building Systems (ETHZ) , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-07-06 , Earliest start: 2026-08-01
Organization Digital Building Technologies
Hosts Lim Ariel
Topics Architecture, Urban Environment and Building
On-chip Cryptographic Signatures
This project focuses on the design and evaluation of a signature circuit intended for secure integration into a CMOS chip. The student will explore different architectural interpretations, implement cryptographic primitives such as hashing and encryption, and assess the circuit’s performance and security. The goal is to identify the most effective design for real-world deployment in secure hardware.
Keywords
VLSI; Cryptography; Hardware Security; RTL Design; HDL; Key Management; Secure Systems; Cybersecurity;
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Contact Details
More information
Published since: 2026-07-02 , Earliest start: 2026-08-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Information, Computing and Communication Sciences , Engineering and Technology
From Generated Shapes to Functional Structures

Generative models can produce convincing 3D shapes from a sentence or an image, but the shapes are made to look right rather than to hold up in use, and current physics-aware fixes change only the surface under loads that a person supplies by hand.
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-02 , Earliest start: 2026-07-01 , Latest end: 2027-08-31
Organization Engineering Design and Computing Laboratory
Hosts Stankovic Tino
Topics Information, Computing and Communication Sciences , Engineering and Technology
Differentiable Multiscale Design of Soft Mechanical Metamaterials

Mechanical metamaterials draw their behavior from architected microgeometry rather than from the base material. Designing them for the soft, large-deformation regime that matters for soft robotics, wearables, and energy absorption remains hard because the link between microarchitecture and macro response becomes strongly nonlinear at large strain, where linear homogenization no longer holds.
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-07-02 , Earliest start: 2026-07-01 , Latest end: 2027-08-31
Organization Engineering Design and Computing Laboratory
Hosts Stankovic Tino
Topics Information, Computing and Communication Sciences , Engineering and Technology
Digital Solutions for Intelligent Machining
In collaboration with leading partners from Swiss industry, this project offers an excellent opportunity to develop next-generation virtual machining for milling and turning processes using physics-informed digital twins. By combining process simulation with modern artificial intelligence such as large language models (LLMs), the framework aims to enable intelligent machining-strategy optimization that boosts productivity, part quality, and tool utilization, delivering significant economic and environmental benefits for manufacturing.
Keywords
Manufacturing; Modeling; Artificial Intelligence
Labels
Internship
Description
Goal
Contact Details
More information
Published since: 2026-07-02
Organization Computational Modelling of Materials in Manufacturing
Hosts Ostad Ali Akbari Vahid, Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
Emergent Acoustic Communication in Robot Groups

Can robots develop their own communication system through sound? We are looking for motivated students to join an interdisciplinary research project at the intersection of robotics, AI, acoustic signaling, and collective behavior.
Keywords
Emergent acoustic communication, Robot Learning, multi-agent communication.
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-07-01 , Earliest start: 2026-05-15
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts An Tianxu , Wang Shengzhi
Topics Information, Computing and Communication Sciences , Engineering and Technology
Development of Permeable Balloon Catheters for Targeted Drug Delivery

This project focuses on designing and fabricating variably permeable balloon membranes for robotic catheters capable of delivering therapeutics directly to diseased tissue. The work combines materials science, medical device development, and microfabrication to advance minimally invasive cardiovascular therapies.
Keywords
Targeted Drug Delivery, Balloon Catheters, Soft Materials, Medical Devices, Microfabrication, Materials Science
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-26 , Earliest start: 2026-07-19 , Latest end: 2027-05-31
Organization Multiscale Robotics Lab
Hosts Bonomo Tiziano
Topics Engineering and Technology , Chemistry
Organic 3D-Printable Paste Development for Ceramic DIW
Clay can be shaped and formed through a wide range of techniques, and a subsequent sintering process transforms it into ceramic, a stiff and durable material well-suited to building components. In Direct Ink Writing (DIW), clay must retain a certain water content to enable extrudability for printing. After printing, the part passes through a drying stage in which water is lost, causing shrinkage, and is then sintered at high temperatures. The shrinkage and warping that occur during drying and sintering introduce dimensional deviations, which are problematic for the tolerances required in building components. Therefore, this research develops an organic composite paste to be co-extruded during the 3D-printing process, which aims to reduce the drying and sintering shrinkage of the resultant ceramic component.
Keywords
additive manufacturing, 3D printing, biomaterials, paste formulation, ceramics, clay
Labels
Semester Project , Collaboration , Bachelor Thesis , Master Thesis , Focus Project (ETHZ) , Studies on Engineering Design (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-06-26 , Earliest start: 2026-07-13 , Latest end: 2027-04-01
Organization Digital Building Technologies
Hosts Lim Ariel
Topics Engineering and Technology
Manufacturing of advanced neurovascular balloon catheters

This project addresses the challenges of fabricating precision balloon catheters with advanced soft materials through the development of novel manufacturing techniques and experimental validation.
Keywords
Neurovascular Catheters, Targeted Drug Delivery, Advanced Manufacturing, Microfabrication, Medical Devices, Multi-Scale Robotics
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-26 , Earliest start: 2026-07-19 , Latest end: 2027-05-31
Organization Multiscale Robotics Lab
Hosts Bonomo Tiziano
Topics Engineering and Technology
Side and Non-Planar Ironing for FDM 3D Printing

Study the interplay of FDM ironing process parameters on an existing platform and extend it with new hardware tools, measurement systems and a software toolchain. Ideally build a self optimizing system by automation of the sourface roughness measurement step within the printer.
Keywords
FDM, Prusa XL, G-code, ironing, surface roughness, toolpath planning, closed-loop optimization
Labels
Semester Project , Bachelor Thesis , Master Thesis
The Project
Your Task
You have...
Facts
Contact Details
More information
Published since: 2026-06-25 , Earliest start: 2026-07-05 , Latest end: 2026-12-31
Organization pd|z Product Development Group Zurich
Hosts Stein Tom
Topics Engineering and Technology
Human study to validate wearable technology for scoring of movement analysis tests

We aim to conduct a study with human participants to assess the function of our textile-based wearable technology for movement monitoring in clinical and fitness scenarios.
Keywords
smart clothing, wearable technology, textile sensor, fitness tracking, sports medicine, rehabilitation, human study, motion capture, computer science
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-23 , Earliest start: 2026-07-15 , Latest end: 2026-12-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Medical and Health Sciences , Engineering and Technology
Building AI-assisted algorithms for robust motion monitoring with smart clothing after re-wearing

The aim of this project is to use machine learning methods to improve smart clothing motion tracking when sensors shift between sessions and wears without fully retraining the model.
Keywords
smart clothing, wearable technology, textile sensor, fitness tracking, sports medicine, machine learning, artificial intelligence, domain adaptation, deep learning
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-23 , Earliest start: 2026-02-01 , Latest end: 2027-03-31
Organization Biomedical and Mobile Health Technology Lab
Hosts Ahmadizadeh Chakaveh
Topics Information, Computing and Communication Sciences , Engineering and Technology
Unified Whole-Body Manipulation Controller

This project aims to develop a unified controller for a quadruped robot equipped with a manipulator arm to command legs and arm simultaneously for mobile manipulation. We aim to enable complex mobile manipulation behaviors on hardware that require coordinated use of both the arm and legs, for example, carrying a large ball using simultaneous arm-foot interaction.
Keywords
reinforcement learning; robotics; robot learning
Labels
Semester Project , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-06-22 , Earliest start: 2026-07-01
Organization Robotic Systems Lab
Hosts Elanjimattathil Aravind
Topics Information, Computing and Communication Sciences
Modelling of the Electrode–Electrolyte–Neuron Interface in High-Density CMOS Microelectrodes

This project explores the biophysical and electrochemical processes at the electrode–electrolyte–cell interface in state-of-the-art CMOS-based microelectrode arrays for in vitro electrophysiology. The student will develop theoretical and computational models of microelectrodes, including the effects of biological coatings and electrical stimulation. The work will be initially modelling-focused, with opportunities for experimental validation.
Keywords
Neuroscience, Electrochemistry, Neural interfaces, Physics, Biomedical Engineering
Labels
Semester Project , Internship , Lab Practice , Master Thesis
Description
Contact Details
More information
Published since: 2026-06-19 , Earliest start: 2026-09-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Medical and Health Sciences , Engineering and Technology , Chemistry , Biology , Physics
Transformative electrode designs for transcutaneous and transcranial brain sensing and stimulation

The goal of the project is to develop new designs and architectures of soft and compliant electrodes used on human skin, including scalp, in context of wearable sensing and stimulation.
Keywords
wearable, electrode, rehabilitation, design, material, sensing, stimulation
Labels
Semester Project , Bachelor Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-17
Organization Biomedical and Mobile Health Technology Lab
Hosts Shokurov Aleksandr
Topics Engineering and Technology , Chemistry
Mechanophores for advanced wearable strain and pressure sensors
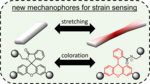
The goal of the project is to synthesize and characterize a number of small molecules capable of acting as mechanophore addition to various polymers. These polymers would then be used as wearable strain or pressure sensors.
Keywords
mechanophore, polymer, wearable, sensor, color, strain, pressure
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-17
Organization Biomedical and Mobile Health Technology Lab
Hosts Shokurov Aleksandr
Topics Engineering and Technology , Chemistry
Smart Microcapsules for Biomedical Advances

This Master's thesis/semester project focuses on the microfluidic fabrication of microcapsules with multi-environmental responsiveness. The aim is to develop microcapsule-based microrobots capable of adapting to various environmental cues. We envision that these microrobots will be used for complex tasks in biomedical applications.
Keywords
Microfluidics, Microcapsules, Microrobotics, Responsive Polymers, Biomedical Engineering
Labels
Semester Project , Internship , Master Thesis , Student Assistant / HiWi , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-06-16 , Earliest start: 2026-09-01
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Medical and Health Sciences , Engineering and Technology , Chemistry
Monitoring in-vitro neural network dynamics using microelectrode arrays

Join our interdisciplinary research team to explore the fascinating world of neuronal networks in vitro. These master projects focus on culturing neurons on CMOS-based microelectrode arrays (MEAs) to study their electrophysiological properties. The exact project scope will be tailored to your interests and background, offering a unique opportunity to contribute to cutting-edge neuroscience and bioengineering research.
Keywords
Neuroscience, Cell Culture, CMOS MEA, Electrophysiology, In Vitro Models, Neural Networks, Bioengineering, Neurotechnology
Labels
Semester Project , Internship , Lab Practice , Master Thesis
Description
Contact Details
More information
Published since: 2026-06-12 , Earliest start: 2026-08-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Medical and Health Sciences , Engineering and Technology , Biology
Physics-Based Modelling of Hydrogen Embrittlement in Steels
Hydrogen embrittlement is one of the key challenges limiting the safe deployment of hydrogen infrastructure. Hydrogen can diffuse into metallic materials, accumulate at critical microstructural features, and significantly reduce ductility, fracture toughness, and fatigue resistance. Despite decades of research, the underlying mechanisms remain incompletely understood, and reliable predictive models are still under active development. This project combines experimental characterization and physics-based modelling to investigate hydrogen embrittlement in pipeline steels. Students will analyse experimental data, perform targeted mechanical testing, and develop computational models capable of linking hydrogen transport, microstructural interactions, and mechanical degradation. The project offers a unique opportunity to work on a scientifically challenging problem that is central to the future hydrogen economy.
Keywords
Hydrogen Embrittlement; Hydrogen Transport; Hydrogen Trapping; Damage Mechanics; Physics-Based Modelling; Coupled Diffusion-Mechanics
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-12 , Earliest start: 2026-07-01 , Latest end: 2027-05-31
Applications limited to ETH Zurich
Organization Experimental Continuum Mechanics
Hosts Hosseini Ehsan
Topics Engineering and Technology
Can Existing Pipelines Safely Transport Hydrogen? A Fracture Mechanics and Finite Element Investigation
Hydrogen is expected to play a key role in the transition towards a low-carbon energy system, with existing pipeline infrastructure offering an attractive route for large-scale hydrogen transport. However, hydrogen can reduce fracture resistance and accelerate crack growth in pipeline steels, creating significant structural integrity challenges. This project investigates the use of finite element methods to improve fracture mechanics assessments of hydrogen pipelines, with particular focus on welded joints and residual stress effects. Building on existing simulation models and previous student projects, the work will involve the validation and application of fracture mechanics methods in ABAQUS, comparison with current engineering assessment procedures, and evaluation of the influence of weld residual stresses on crack-driving forces. The project offers hands-on experience in fracture mechanics and finite element analysis.
Keywords
Hydrogen Embrittlement; Fracture Mechanics; Finite Element Analysis; Pipeline Integrity; Welded Structures
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-12 , Earliest start: 2025-09-15 , Latest end: 2026-03-31
Applications limited to ETH Zurich
Organization Experimental Continuum Mechanics
Hosts Hosseini Ehsan
Topics Engineering and Technology
Micromechanical Modeling of Fracture and Interlayer Weakening in 3D-printed Concrete
3D-printed concrete (3DPC) is an emerging construction technology that enables material-efficient and geometrically flexible structures for future infrastructure. However, one of its major limitations is the reduced mechanical performance of the interfaces between printed layers. Since the material is deposited layer by layer, the interlayer region may contain elongated voids, local variations in particle distribution, reduced stiffness, and weaker bonding between consecutive layers. These effects can promote premature crack initiation and reduce the strength of printed components compared to conventionally cast concrete. A promising approach to study these mechanisms is provided by lattice-based fracture models, in which the material is represented by a network of structural elements [1, 2]. Such models can explicitly account for heterogeneity, local defects, and complex fracture paths, making them well suited for investigating interlayer fracture in 3DPC. To better understand fracture in lattice materials, we have developed scalable yet complex research frameworks in C++ and MATLAB. This project aims to establish a reproducible benchmark model in Abaqus inspired by experimental studies on 3DPC interlayer fracture. Based on this benchmark, the student will develop and assess simplified representations of the interlayer zone using modified lattice properties, weakened interfaces, or explicit defect patterns. The project will include a systematic study of modeling assumptions related to stiffness variation, strength reduction, and defect geometry, with the goal of identifying which features are most relevant for capturing the experimentally observed fracture behavior. This project will be carried out in collaboration with experts from Eindhoven University of Technology, who can provide experimental insight and, where available, data for model comparison.
Keywords
Fracture Mechanics, Additive Manufacturing, Computational Mechanics, FEA, Concrete
Labels
Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Goal
Contact Details
More information
Published since: 2026-06-11 , Earliest start: 2026-09-07 , Latest end: 2027-04-30
Organization Mechanics and Materials
Hosts Kraschewski Kevin
Topics Engineering and Technology
Acceleration of Crack Growth Prediction in Metamaterials by Distributed CPU-GPU Computing
Predicting crack growth in architected and cellular materials requires simulations that resolve large beam networks with complex, localized failure patterns. Unlike classical solids, these materials fracture through the discrete breaking of individual struts, which leads to highly nonlinear behavior. Capturing this behavior accurately demands large-scale finite element computations, where realistic models can easily involve millions to billions of degrees of freedom. To handle these scales, our group is developing an open-source C++ library for scalable finite element simulations, currently optimized for CPU-based parallelism using Open MPI on the Euler cluster of ETH Zurich. However, as system sizes and model fidelity increase, CPU-only workflows become performance-limited. This project aims to overcome these bottlenecks by integrating GPU acceleration into the existing distributed codebase, leveraging NVIDIA GPU hardware to significantly extend the library’s computational efficiency beyond what CPU-based parallelism alone can provide. Throughout this project, the student will contribute to an open-source project, conduct in-depth performance studies, and utilize the developed software to predict fracture behavior in novel materials with different (multi-)material properties, including both linear elastic and plastic regimes.
Keywords
GPU, HPC, Fracture, Accelerators, C++
Labels
Master Thesis , ETH Zurich (ETHZ)
Contact Details
More information
Published since: 2026-06-11 , Earliest start: 2026-09-20 , Latest end: 2027-04-30
Organization Mechanics and Materials
Hosts Kraschewski Kevin
Topics Information, Computing and Communication Sciences , Engineering and Technology
Underwater Jellyfish Robot: Design, Modeling, and Control

In this project, the student would help a PhD to finish a work involving an underwater robot that is inspired by jellyfish. A first prototype exists, yet many changes need to be made to the hardware before proper modeling and control can be applied.
Keywords
Soft robot, underwater, mechanical design.
Labels
Semester Project , Bachelor Thesis , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-10 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Michelis Mike , Katzschmann Robert, Prof. Dr.
Topics Engineering and Technology
Deployment and Programming of a Dextrous Robotic Hand to Study the Effect of Abduction in Robotic Dexterity

Deployment and programming of CyberGriper2, a dextrous robotic hand with coordinated finger adduction/abduction developed at the Soft Robotic Lab (SRL) at ETH Zürich, to investigate the effect of coupled ab/d motion on dexterous manipulation. Building on prior static grasping results that demonstrated significant improvements in grasp coverage, dexterity is evaluated dynamically using POMDAR (A Benchmark of Dexterity for Anthropomorphic Robotic Hands)¹, a systematic benchmarking framework grounded in manipulation and grasp taxonomies. The hand is evaluated first via teleoperation and subsequently through a learned autonomous controller, enabling direct comparison of dexterity across different hand architectures.
Keywords
Dexterous manipulation, robotic hand, abduction, teleoperation, motion retargeting, dexterity benchmark, autonomous manipulation, learning from demonstration
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-10 , Earliest start: 2026-06-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Katzschmann Robert, Prof. Dr. , Appius Aurel , Hinchet Ronan
Topics Engineering and Technology
Electrostatic Actuators for Automation Systems

This project focuses on integrating HALVE (Hydraulically Amplified Low-Voltage Electrostatic) actuators into a proportional valve design in collaboration with an industrial partner. HALVE actuators are soft, pouch-based electrostatic devices that operate at voltages 5–10× lower than conventional systems, making them promising candidates for silent, lightweight fluid control applications. The student will rapidly prototype and test a series of actuator geometries tailored to meet the partner's valve specifications.This project offers a unique joint academia–industry experience.
Keywords
soft robotics, low-voltage actuation, electrostatic actuators, proportional valves, rapid prototyping, HALVE, mechatronics, fluid control, fabrication, industry collaboration
Labels
Semester Project , Bachelor Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-09 , Earliest start: 2026-07-01 , Latest end: 2027-02-28
Applications limited to ETH Zurich
Organization Soft Robotics Lab
Hosts Hinchet Ronan , Katzschmann Robert, Prof. Dr. , Albayrak Deniz
Topics Engineering and Technology
Neuroengineering: Controlling and Studying Neuronal Networks In Vitro

This project offers the opportunity to investigate neuronal communication using in vitro models of neural networks. In addition to cultivating and maintaining neuronal cultures, the work may involve shaping neuronal circuits through different methods, actively shaping connectivity and functional organization. Advanced imaging techniques will be used to study neuronal activity and interactions within these controlled systems. A key component of the project is the development and optimization of experimental and analytical methods to interrogate neuronal dynamics, with potential applications in pharmacological screening and neurobiological research.
Keywords
Neuroscience, Neuronal Networks, In Vitro Models, Cell Culture, Microscopy, Biomedical Engineering
Labels
Semester Project , Internship , Lab Practice , Master Thesis
Description
Contact Details
More information
Published since: 2026-06-08 , Earliest start: 2026-09-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Medical and Health Sciences , Engineering and Technology , Biology
Industry Experience in ML & Software with Audi F1, Siemens and many more

Forget the synthetic dataset. Here you get terabytes of real telemetry, a real production constraint and a partner who will deploy what you build. Choose your problem.
Keywords
simulation, robotics, control, prototyping, software, development, mvp, poc, product development, agile, impact, industry, computer science, information technology, optimization
Labels
Semester Project , Course Project , Collaboration , Internship , Lab Practice , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-08 , Earliest start: 2026-09-14 , Latest end: 2027-03-31
Organization pd|z Product Development Group Zurich
Hosts von Salis Marco
Topics Information, Computing and Communication Sciences
Material Science in Industry: From F1 Composites to Carbon-Negative Concrete

Materials are where physics meets the real world. Here you take a material from formulation to characterisation to a partner who needs it to perform. Pick your material:
Keywords
material science, design, simulation, fabric, soft materials, prototyping, product development, agile, impact, industry, rapid prototyping
Labels
Semester Project , Course Project , Internship , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-08 , Earliest start: 2026-09-14 , Latest end: 2027-03-31
Organization pd|z Product Development Group Zurich
Hosts von Salis Marco
Topics Engineering and Technology , Chemistry
Cuffless blood pressure estimation through wearable sensors and AI

This project explores machine learning methods to estimate blood pressure from wearable photoplethysmography signals, progressing from single-site public datasets to multi-site measurements to enhance accuracy through spatial cardiovascular dynamics.
Keywords
blood pressure assessment, biomedical signal analysis, data science, medical technologies, and digital health
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-06-08 , Earliest start: 2026-05-18 , Latest end: 2027-02-28
Organization Biomedical and Mobile Health Technology Lab
Hosts Otesteanu Corin, Dr , Dominguez Federico
Topics Information, Computing and Communication Sciences
Product Development with Industry Partners: Audi F1, VAT & V-ZUG

You did not study mechanical engineering to optimise a textbook beam. Here you get a real component, a real partner, a world-class maker space — and six months to make something that matters.
Keywords
mechanical engineering, design, simulation, fem, robotics, control, prototyping, product development, agile, impact, industry
Labels
Semester Project , Course Project , Internship , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-08 , Earliest start: 2026-09-14 , Latest end: 2027-03-31
Organization ETH Exploration Lab
Hosts von Salis Marco
Topics Engineering and Technology
Master Thesis in Industry: Turn Deep Tech into Real Business

Don’t analyse a case from 2015 — build the business case, run the customer discovery and de-risk a real product with a real company. This is where technology becomes a business. You will sit between brilliant engineering and a real market with a diverse team of various backgrounds.
Keywords
innovation management, business model, business development, go-to-market, customer discovery, market analysis, market sizing, unit economics, financial modeling, pricing strategy, value proposition, technology transfer, commercialization, entrepreneurship, startup, venture, deep tech, B2B, product management, strategy, lean startup, MVP, circular economy, supply chain, Industry 4.0, sustainability strategy, willingness to pay, agile, scale-up
Labels
Internship , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-08 , Earliest start: 2026-09-14 , Latest end: 2027-03-31
Organization pd|z Product Development Group Zurich
Hosts von Salis Marco
Topics Engineering and Technology , Economics , Commerce, Management, Tourism and Services
Sustainability Engineering with Holcim & MAC Jeans

Cement, denim, devices — take on the high-impact, hard-to-abate sectors and build the roadmap to net zero. The easy emissions are already being cut. The hard ones — cement, textiles, industrial supply chains — are where the real fight is. Here you get the data, the partner and the mandate to make a dent.
Keywords
sustainability, life cycle assessment, LCA, decarbonization, net zero, carbon footprint, CO2 capture, emissions, climate, circular economy, environmental modeling, systems thinking, material flow analysis, resource efficiency, energy efficiency, hard-to-abate sectors, green transition, ecodesign, environmental impact, sustainable supply chain, textile sustainability, cement decarbonization, environmental data, agile, development
Labels
Internship
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-08 , Earliest start: 2026-09-14 , Latest end: 2027-03-31
Organization pd|z Product Development Group Zurich
Hosts von Salis Marco
Topics Agricultural, Veterinary and Environmental Sciences
⚡ Power the Podium: Electronics, Control & Sensing with Audi F1 and Siemens

Signals, power, control. Here is where your circuits and controllers leave the lab bench and go into systems that win races, save buildings and build the chips the world runs on. Our industry partners give the problems - you find the solution.
Keywords
usability, pcb design, high-tech, rapid prototyping, sustainability, industrial automation, mechanical design, mechanical engineering, automation, process design, robotics, machine learning, applied AI, food processing, advanced materials, agile, development, product development, control, material science, computer science, electrical engineering, programming
Labels
Semester Project , Course Project , Internship , Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-08 , Earliest start: 2026-09-14 , Latest end: 2027-03-31
Organization ETH Exploration Lab
Hosts von Salis Marco
Topics Information, Computing and Communication Sciences , Engineering and Technology
Engineering of Gastroretentive Drug Delivery systems
Polymer-based drug delivery systems play a central role in shaping modern therapeutics, offering controlled release behavior and improved patient compliance. Yet traditional formulation development still relies largely on resource-intensive and time-consuming iterative experimentation to balance the complex interactions between polymer composition, processing parameters, and drug release behavior. This project aims to build a comprehensive understanding of how formulation variables govern functional performance by integrating active ingredient’s encapsulation studies, rheological and mechanical analyses, and detailed release-kinetic profiling. The resulting dataset will later support data-driven modelling, enabling faster identification of promising compositions. This approach not only streamlines pharmaceutical development but also advances sustainable practices by minimizing material waste, positioning data-driven formulation as a cornerstone of next-generation smart therapeutics.
Keywords
Drug Delivery Polymer formulation Advanced manufacturing Machine learning
Labels
Semester Project , Internship , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-05 , Earliest start: 2026-06-08 , Latest end: 2027-08-31
Applications limited to Balgrist Campus , EPFL - Ecole Polytechnique Fédérale de Lausanne , ETH Zurich , Fernfachhochschule , Zurich University of Applied Sciences , University of Zurich , University of Basel , University of Berne , Institute for Research in Biomedicine , Hochschulmedizin Zürich , Empa
Organization Macromolecular Engineering Laboratory
Hosts Guzzi Elia
Topics Medical and Health Sciences , Engineering and Technology , Chemistry
Probing Identifiability: Material Parameter Recovery in Differentiable Continuum Mechanics Simulations

Predicting how solid materials deform and fail under load is a core challenge in manufacturing, civil engineering, and robotics, which is typically addressed with a continuum mechanics-based simulation such as the Material Point Method (MPM) or the Finite Element Method (FEM). However, their accuracy depends critically on correct material parameterization. Differentiable MPM simulators open a path toward gradient-based parameter identification, enabling material properties to be recovered by minimizing discrepancies between simulation and observation. Using a differentiable MPM, this project investigates the conditions under which such identification is unique and well-posed: what boundary conditions and measurements are necessary, how cost functions should be designed, and how initialization strategies affect convergence.
Keywords
Material Point Method (MPM) Differentiable simulation Inverse problems Parameter identification Continuum mechanics Gradient-based optimization Constitutive modeling Elasto-plasticity Virtual experiment design In-situ material characterization
Labels
Semester Project , Bachelor Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-06-05 , Earliest start: 2026-06-08 , Latest end: 2027-03-01
Applications limited to ETH Zurich , Department of Mechanical and Process Engineering , Institute of Virtual Manufacturing , Advanced Manufacturing Laboratory
Organization Advanced Manufacturing Laboratory
Hosts Bolliger Diego
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Development of a Heterocellular Human Bone Organoid for Precision Medicine and Treatment

Our goal is to establish a heterocellular 3D printed bone organoid model comprising all major bone cell types (osteoblasts, osteocytes, osteoclasts) to recapitulate bone remodeling units in an in vitro system. The organoids will be produced with the human cells, as they could represent human pathophysiology better than animal models, and eventually could replace them. These in vitro models could be used in the advancement of next-generation personalised treatment strategies. Our tools are different kinds of 3D bioprinting platforms, bio-ink formulations, hydrogels, mol-bioassays, and time-lapsed image processing of micro-CT scans.
Keywords
3D printing, bone organoids, co-culture, bioreactor, hydrogels, drug testing
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-06-01 , Earliest start: 2026-07-01 , Latest end: 2027-07-01
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Steffi Chris
Topics Engineering and Technology , Biology
PDMS-Based Bioreactor Investigating Cell Behavior in Response to Hydrostatic Pressure and Substrate Stiffness

Introduction and Background Skin cells dynamically respond to mechanical and biochemical stimuli, which influence critical processes such as proliferation, differentiation, and migration. By understanding this interplay, mechanical and biochemical stimuli may be used in the future to facilitate the growth of skin patches, tissue formation, and organ regeneration, enabling new therapies and benefiting patients. The study of these responses, mechanobiology, requires advanced in-vitro systems to emulate physiological conditions. This project utilizes a device designed for controlled manipulation of hydrostatic pressure (0.1–1.5 kPa) and substrate stiffness (0.1–100 kPa). The system facilitates isolated and scalable experiments to analyze how the interplay of these mechanical parameters affects cell behavior. In this thesis, the student will use this system to investigate how different stimuli affect cell behavior.
Keywords
Bioreactor, tissue engineering, organ regeneration
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-06-01 , Earliest start: 2025-09-01 , Latest end: 2026-03-05
Organization Macromolecular Engineering Laboratory
Hosts Binz Jonas
Topics Engineering and Technology , Biology
Innovation Traineeship in Industry

ETH Zürich's Exploration Lab is partnering with multiple companies, such as Audi F1, V-Zug, J&J, Siemens, Holcim, SHL Medical, MAC Jeans, Bossard and VAT. We offer a unique opportunity: You have the freedom to work on real-world projects across multiple domains based on your interest. Best thing: Get an internship, course and thesis all-in-one.
Keywords
usability, high-tech, rapid prototyping, sustainability, industrial automation, mechanical design, mechanical engineering, automation, process design, robotics, machine learning, applied AI, food processing, advanced materials, agile, development, product development, control, material science, computer science, electrical engineering
Labels
Semester Project , Collaboration , Internship , Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-29 , Earliest start: 2026-09-14 , Latest end: 2027-03-31
Organization ETH Exploration Lab
Hosts von Salis Marco
Topics Agricultural, Veterinary and Environmental Sciences , Medical and Health Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Earth Sciences
How Mechanical Forces Shape Cell Fate – and the Future of Regenerative Medicine

Project Summary We’re developing a powerful new in vitro model to untangle the complex mechanical cues—osmotic pressure and substrate stiffness—that skin cells experience every day. These signals are deeply intertwined in the body, but we’re building a system to decouple and precisely control them, for the first time. Why? Because understanding how cells respond to these forces is crucial for engineering functional tissues, guiding organ regeneration, and tackling mechanobiology-driven diseases like fibrosis.
Keywords
Key words: mechanical stresses, cell behavior, fibroblasts, immunostaining.
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-26 , Earliest start: 2026-07-02 , Latest end: 2027-02-28
Organization Macromolecular Engineering Laboratory
Hosts Cuni Filippo
Topics Medical and Health Sciences , Engineering and Technology , Biology
Operator Learning for Solid Mechanics
We aim to develop general and flexible strategies that can be applied to operator learning frameworks and are specific to challenges appearing in solid mechanics problems.
Keywords
Scientific Machine Learning; SciML; Plasticity; Solid Mechanics; Operator Learning; Artificial Intelligence for Science; Machine Learning;
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-19 , Earliest start: 2026-09-01
Organization Computational Mechanics Group
Hosts Mousavi Sepehr
Topics Information, Computing and Communication Sciences , Engineering and Technology
Agentic AI for Creating Large Solid Mechanics Datasets
We aim to design and create a framework that uses language model agents to create large physics datasets with minimum human intervention or supervision.
Keywords
Solid Mechanics; Material Modeling; Scientific Machine Learning; SciML; Finite element method; Large language models; LLMs; Agentic AI; NLP
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-19 , Earliest start: 2026-02-16
Organization Computational Mechanics Group
Hosts Mousavi Sepehr , Massoudi Soheyl
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology
FactoryNet: Training Data and Foundational Models for Industrial AI

Unplanned downtime costs manufacturers $2.3M per hour, yet no open dataset connects sensor telemetry to structured fault diagnosis at scale. Forgis is building HYPERION, the first foundation model for cyberphysical systems (EUR 3.8M funding,$500kcompute credits). FactoryNet is its training data engine — 1M+ causally-structured, multimodal episodes spanning 15+ machine types — just awarded 50,000 GPU-hours on CSCS Alps through the Swiss AI Initiative.
Keywords
Robotics, Control, AI, Foundation Model, Industrial Automation
Labels
Master Thesis
The Project
Your Task
You have...
About pd|z
Facts
Contact Details
More information
Published since: 2026-05-18 , Earliest start: 2026-05-31 , Latest end: 2027-05-31
Organization pd|z Product Development Group Zurich
Hosts Gimeno Lucas
Topics Engineering and Technology
The Shape of Growth: Simulating Stress and Form in Living Matter
Are you interested in exploring the exciting intersection of solid mechanics, transport phenomena, and soft matter physics? In this project, you will model how internal stresses and material patterns emerge when a soft, living-like material grows while being fed by a diffusing nutrient. You will build a simple but powerful 2D multiphysics model—from the physics all the way to the simulation—using modern differentiable tools. You’ll treat growth as an anisotropic eigenstrain driven by a nutrient field around a circular “biofilm-like” inclusion. By coupling diffusion with mechanical constraint, you will discover how even modest, non-uniform growth can generate complex stress fields, directional patterns, and the first signs of damage. This hands-on project offers an accessible introduction to multiphysics modeling while revealing how growth and mechanics compete to shape living and soft materials.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Biology , Physics
Mix and match: hybrid materials for tunable mechanical response
Architected materials leverage their topology to deliver customized properties unattainable with monolithic materials. Their global mechanical behavior, including stiffness, strength, and failure, depends on both the topology and the properties of the constituent material. This project investigates the fracture and deformation behavior of polymer, fiber composites, and hybrid architected materials, using additive manufacturing and mechanical testing. The goal is to understand the influence of the reinforcement and local material stretchability on the network response and whether different phases could produce unconventional mechanical responses, such as enhanced toughness, delayed failure, or tunable energy dissipation. The project is multi-faceted, combining additive manufacturing, mechanical testing, and data analysis, and can be adapted to the expertise and interests of the student.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
From Pixels to Models: Bridging Optical Measurements and Fi nite Element Simulations of Lattice Failure
Architected materials derive unique mechanical properties from their engineered internal geometry. However, understanding how these materials fail is challenging because their failure is a complex, multiscale process, yet essential for designing materials with targeted failure behavior. Optical techniques such as digital image correlation (DIC) offer a promising way to link the deformation of individual beams within a lattice to the overall failure of the structure. The goal of this project is to evaluate whether finite element simulations can accurately reproduce the deformations measured by DIC and whether the numerically predicted failure strains result in a crack path consistent with experimental observations. Depending on the student’s interests, the project can focus solely on numerical simulations or include experimental testing of 3D-printed lattice specimens combined with optical imaging.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
Fundamental understanding of the mechanics of fresh cement paste
The properties of fresh cement paste have become a big research topic since the advent of concrete 3D printing a decade ago. While we are able to print large-scale structures, we surprisingly lack fundamental understanding of the processes governing fresh cement paste stiffening. This is because when cement paste is in its fresh state, there are complex physical and chemical reactions taking place simultaneously. A recent experimental protocol coupled measurements of chemical reactions to the stiffening of the paste, allowing to gain deep fundamental understanding of the origins of fresh cement paste stiffening (https://www.sciencedirect.com/science/article/pii/S0008884624002461, https://ceramics.onlinelibrary.wiley.com/doi/10.1111/jace.70271). The idea of the present project isto apply the same state-of-the-art protocol to “clean” systems (tricalcium silicate paste rather than cement paste), which will allow to settle current debates in the cement community.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Architecture, Urban Environment and Building , Physics
Investigation and optimization of the experimental setup of rammed earth test specimens
The influence of the experimental setup of rammed earth specimens on their compressive strength is poorly understood. The common technique to prepare rammed earth samples for compression tests is to float their surfaces with a thin gypsum layer. However, to which extend is this method affecting the clamping of the sample and therefore the compressive strength? Can a uniaxial stress state be guaranteed? The idea of this project work is to (1) conduct research about the experimental setup for cubic samples and wall elements used in masonry, serving as a comparison to rammed earth; (2) Produce rammed earth samples and perform compression tests applying different test setups; (3) Propose more precise and time-efficient methods to float rammed earth samples.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Earth Sciences , Architecture, Urban Environment and Building , Physics
Contact mechanics of lattices with engineered surfaces
Architected lattice materials offer vast opportunities for tailoring mechanical response through geometry. While most studies emphasize bulk behavior, the mechanics of contact of architected lattices with engineered surface topographies remain largely unexplored. This project investigates how variations in surface profile geometries influence frictionless contact behavior. How do changes in topography shape affect the evolution of real contact area, pressure distribution, and load-displacement response? Can these effects be systematically captured through numerical simulations? The student will first generate lattice geometries with controlled surface descriptions and then simulate their contact with rigid surfaces to reveal the underlying mechanisms governing their macroscopic response.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
Computational modeling of reactive and non-reactive multiphase flow processes
This project employs numerical modeling of reactive and non-reactive multiphase flow and transport processes relevant to a wide range of engineering and environmental systems. Using computational fluid dynamics (CFD) and custom numerical tools, the work aims to simulate coupled flow, transport, and reaction phenomena in porous and non-porous materials.
Keywords
Numerical simulations; Flow and transport modeling; Computational fluid dynamics (CFD); OpenFOAM; Coding; Porous media; Building materials; Corrosion; Material degradation; Computational modeling; Reactive processes.
Labels
Bachelor Thesis , Master Thesis
Description
Contact Details
More information
Published since: 2026-05-15
Organization Durability of Engineering Materials (Prof. Angst)
Hosts Malenica Luka
Topics Agricultural, Veterinary and Environmental Sciences , Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Earth Sciences , Chemistry , Physics
Time Changes Everything, Including the Fracture of Soft Materials
Soft materials are fascinatingly stretchable and resistant — just think about your skin, muscles, and brain, or other artificial materials like the rubber band in a slingshot and the hydrogels used for drug delivery. Why are they able to undergo such extreme deformations? What exactly happens when they finally break? If you hold soft materials under a constant load or in a stretched position, or apply force at varying rates, their mechanical response changes over time—a property known as viscoelasticity. You may have heard of creep (a slow, continuous deformation under load), typically observed in materials like concrete. Now, imagine this process happening faster, and in a highly stretched material like a rubber band. How do these viscoelastic phenomena influence the fracture mechanism? In this project, you will learn about vis- coelasticity, soft materials, perform advanced FEM simulations using ETH supercomputers, and analyze your results to understand this process from a fundamental level.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
An Atomistic Understanding of Cracks in Soft Materials
Soft materials are fascinatingly stretchable and resistant — just think about your skin, muscles, and brain, or other artificial materials like the rubber band in a slingshot and the hydrogels used for drug delivery. Why are they able to undergo such extreme deformations? What exactly happens when they finally break? At the atomistic scale, soft materials are far from smooth. They are chaotic, tangled webs of polymer chains joined by cross-links. Imagine a microscopic bowl of spaghetti where every strand is fighting against tension. We want to study these soft networks to get insights into their local behavior and understand precisely how these microscopic events lead to macroscopic fracture. Do you want to uncover the secrets behind the toughness of soft networks? In this project, you will learn about soft materials, perform advanced atomistic simulations using ETH supercomputers and analyze your results to understand the physics of the problem from a fundamental level.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
Developing Multi-Functional Microrobots Using Microfluidic Chips (3M project)

We are looking for a motivated Master’s student to join an exciting interdisciplinary thesis project, collaborating between the Multi-Scale Robotics Lab (D-MAVT) and the deMello group (D-CHAB) at ETH Zurich. This project focuses on creating a novel microfluidic-based bottom-up method to fabricate multifunctional microrobots. This innovative approach seeks to revolutionize microrobot fabrication, opening the door to diverse new applications.
Keywords
Microfluidics, Self-assembly, Microrobots
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-15 , Earliest start: 2026-09-14
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Engineering and Technology , Chemistry
The Great Encyclopedia of Cracks in Soft Materials
Soft materials are fascinatingly stretchable and resistant — just think about your skin, muscles, and brain, or other artificial materials like the rubber band in a slingshot and the hydrogels used for drug delivery. Why are they able to undergo such extreme deformations? What exactly happens when they finally break? Soft materials exhibit a broad range of complex, highly nonlinear behaviors that require specialized constitutive laws. Think of these as the advanced evolution of Hooke’s Law — equations capable of describing materials that stretch far beyond the linear limit. Consequently, unlike traditional materials such as glass or concrete, there is no ’textbook’ explaining how soft materials break. The aim of this project is to bridge this fundamental gap in our understanding. You will learn about soft materials, perform advanced FEM simulations using ETH supercomputers and analyze different nonlinear elastic constitutive laws generating valuable information that does not exist yet.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
Numerical modeling of fracture
This project focuses on the numerical investigation and computational implementation of a phase-field formulation for brittle fracture in deformable solids. Phase-field models provide a diffuse-interface representation of crack evolution, enabling the simulation of crack initiation, propagation, branching, and coalescence without explicit crack tracking. The primary objective is to develop a robust and efficient finite element–based implementation of a coupled displacement–damage phase-field system derived from variational fracture mechanics. The governing equations, consisting of a mechanical equilibrium equation and a phase-field evolution equation, will be discretized using appropriate spatial and temporal schemes, with particular attention to numerical stability, mesh resolution requirements, and irreversibility constraints on damage evolution.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
Testing the Limits of Seismic Inversions
How reliable are the methods used to infer fracture energy from real earthquakes? Fracture energy, the energy dissipated on a fault during rupture, plays a key role in determining earthquake dynamics and scaling laws. Yet, its actual value and scaling behavior remain controversial: some studies suggest it increases with earthquake magnitude, while others argue it is a material constant. In this project, you will evaluate one widely used approach that estimates fracture energy from kinematic inversions of seismic data. The idea is to test how well this method performs when the ground truth is known. You will simulate earthquake ruptures, extract the resulting displacement fields, and then downsample them to match the limited resolution of real seismic observations. By applying the same inversion techniques that seismologists use, you will assess how much information about fracture energy can truly be recovered and where the current methods fail. This project offers a unique opportunity to combine earthquake mechanics, numerical modeling, and data analysis to challenge a long-standing assumption in seismology and gain deep insight into the physics of fault rupture.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Earth Sciences , Physics
From Re-Cycling to Re-Use: Discovery of new Kirigami-inspired Magneto-Elastic materials
Can mechanical properties change after material synthesis? Engineering materials are commonly optimized to perform one task extremely well. But what when instead of recycling, one can change material properties on the fly? Then, without increasing the embodied energy by mechano-chemical processing, materials will be re-usable after minimal external work! In this project, we exploit Magneto-Elastica (magnets moving in their own field) and Kirigami (manufacturing by cutting). Specifically, we discover a design strategy to control material stability without remote control. You will use and build upon existing numerical models to explore the design space of magnets embedded in elastic bodies. You will make a real-world model by additive manufacturing. This proof-of-concept model will display at least two material responses that are reachable with minimal external manipulation.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
MESHA Material: Magneto Elastic Self-Healing Architectured Material
Fabrication of architected materials through self-assembly of elementary units offers advantages over monolithic solids including recyclability and miniaturization. While self-assembly is prevalent in atomic synthesis, it is sparse at the macroscale. Recent success in the assembly of rigid lattices with sticky magnetic vertices showcase fracture toughening and self-healing. However, the discovery of lattice topologies of minimum embodied energy remains a challenge. The aim of this project is to numerically synthesize space-filling semi-, demi- and regular topologies for magneto-elastic lattices. You will use open-source, Monte Carlo-based, self-assembly code of rigid units with diverse shapes and magnetic orientations. Secondly, you will asses the mechanical stability of the most promising, synthesized magneto-elastic lattices. The magneto-elastic architectured material will combine high strength and fracture toughness, properties that are usually mutually exclusive.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
Rolling, Gliding, Tumbling and Jumping: Transient Instabilities of Packaged Mail on Conveyor Belts
Self-Excited vibration and lift-off (loss of contact) present big concerns in engineering applications of conveyor belts. However, the friction law between the object and the conveyor belt one uses is simplified for tractability sake; the transient response of the belt is neglected. In this project, we investigate the initial conditions and system characteristics that lead to self-excited vibrations, lift-off and chaotic motion of the mass-on-moving-belt system. The goal is to couple a two-degrees-of-freedom harmonic oscillator and an existing boundary element method. You will implement a time-marching scheme, optimise and transfer existing code, to compare numerical results with existing theory. The outcomes of this project include the effect of initial conditions, changes in loading rate and characteristic material time on the mass-on-moving-belt response.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Engineering and Technology , Physics
Can an AI Rediscover the Laws of Physics? A Machine Learning Approach to Beam Theory
Are you interested in exploring the exciting intersection of solid mechanics and artificial intelligence? In this project, you will investigate whether a machine learning model can autonomously rediscover the fundamental principles of classical beam theory. You will use a Variational Autoencoder (VAE), a powerful generative model from the world of AI, to analyze high-fidelity Finite Element (FE) simulations of a cantilever beam. By generating data for both slender beams and thick beams, you will challenge the VAE to compress each beam’s complex deformation field into a simple, low-dimensional ”latent space.” The core of the project is to decode this space and test the hypothesis that the AI has learned the correct physical degrees of freedom—such as curvature, axial strain, and shear. This project is a unique hands-on introduction to the field of scientific machine learning. You will develop a deep intuition for how AI can be used not as a ”blackbox,” but as a powerful tool to generate physical hypotheses and bridge the gap between classical engineering principles and modern data science.
Labels
Master Thesis , ETH Zurich (ETHZ)
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-15 , Earliest start: 2026-08-01 , Latest end: 2027-03-01
Organization Solid Mechanics (Prof. Kammer)
Hosts van Jan
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Physics
3D Scene Completion in Gaussian Splatting
Robots rarely get the luxury of a perfect map. During exploration, they are constantly fighting against "unknowables" such as occlusions, shadows, and unvisited corners that leave gaps in their understanding of the world. This project aims to address this by implementing 3D Gaussian Scene Completion, where the system proactively fills unobserved regions with learned geometric priors.
Keywords
3D Gaussian Splatting Scene reconstruction Scene completion 3D Graphics
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-14 , Earliest start: 2026-05-18
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Wilder-Smith Max
Topics Information, Computing and Communication Sciences
Understanding Plant Protein Behavior at Interfaces: Shaping Sustainable Emulsions
Have you ever tried to drink a plant-based milk cappuccino with depressive foam? Why do plant-based milks create weaker foams? How do plant proteins behave at air-water and oil-water interfaces? With increasing focus on sustainability, plant-based proteins have emerged as alternatives in the food industry. However, plant proteins are less understood, complex in structure, composition, interfacial behavior, as well as sensitive to physicochemical changes. To effectively utilize plant-based proteins as functional ingredients, understanding of their fundamental interfacial behavior is essential. In this project, we aim to thoroughly understand how plant proteins adsorb, unfold and rearrange at interfaces, in order to facilitate the creation of more sustainable emulsions and foams. Soft matter material characterization techniques are used.
Keywords
Soft Matter Food Science Rheology Plant Proteins
Labels
Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-12 , Earliest start: 2026-09-15 , Latest end: 2027-03-31
Organization Laboratory of Food Process Engineering
Hosts Lin Li-Hsuan
Topics Engineering and Technology
Reconstruct Human-scene interaction with gaussian splatting avatars

Three-dimensional (3D) reconstruction of dynamic scenes, particularly those involving humans interacting with their environment, remains a challenging problem in computer vision and graphics. Traditional volumetric and mesh-based methods can struggle with occlusions, complex geometries, and real-time performance. Recent advances in neural rendering—especially Gaussian splatting—offer promising alternatives by representing scenes as clouds of oriented 3D Gaussians (“splats”) that can be rendered extremely efficiently. The goal of this project is to develop a novel pipeline that leverages Gaussian splatting to reconstruct, analyze, and interpret human–scene interactions in 3D.
Keywords
3D reconstruction, Gaussian splatting, Human pose estimation
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-12
Applications limited to ETH Zurich , University of Zurich
Organization pd|z Product Development Group Zurich
Hosts Wang Rui
Topics Information, Computing and Communication Sciences
Nature-Derived Microrobots: From Materials to Motion

We invite applications for a Master's thesis / semester project that focuses on the fabrication of microrobots with materials from the nature. Using our developed technique, this project will explore how different shapes influence their control behaviors in bio-fluids. This research aims to advance biomedical technologies, particularly in targeted drug delivery and minimally invasive procedures.
Keywords
Microrobotics, Fluid Dynamics, Biomedical Devices
Labels
Semester Project , Master Thesis , Student Assistant / HiWi , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-09-01
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Engineering and Technology , Chemistry
Microrobots Made from Droplets

We invite applications for a Master's thesis / semester project that focuses on the fabrication of microrobots with custom shapes. Using our developed droplet printing technique, this project will explore how different microrobot shapes, created by different magnetic fields and materials, influence their control behaviors in blood vessels. This research aims to advance biomedical technologies, particularly in targeted drug delivery and minimally invasive procedures.
Keywords
Microrobotics, Inkjet Printing, Soft Materials, Biomedical Devices
Labels
Semester Project , Master Thesis , Student Assistant / HiWi , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-09-14
Organization Multiscale Robotics Lab
Hosts Hu Minghan
Topics Engineering and Technology , Chemistry
Computational Modeling of Muscle Dynamics for Biohybrid Robots
This research aims to advance biohybrid robotics by integrating living biological components with artificial materials. The focus is on developing computational models for artificial muscle cells, a critical element in creating biohybrid robots. Challenges include modeling the complex and nonlinear nature of biological muscles, considering factors like elasticity and muscle fatigue, as well as accounting for fluid-structure interaction in the artificial muscle's environment. The research combines first principle soft body simulation methods and machine learning to improve understanding and control of biohybrid systems.
Keywords
Biohybrid Robotics, Computational Models, Soft Body Simulation, Finite Element Method (FEM), Muscle Dynamics, Soft Robotics
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Mekkattu Manuel , Katzschmann Robert, Prof. Dr.
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology , Biology , Physics
GPU Acceleration of Soft Robot Modeling: Enhancing Performance with CUDA

We are enhancing soft robot modeling by developing a GPU-accelerated version of our FEM-based framework using CUDA. This research focuses on optimizing parallel computations to significantly speed up simulations, enabling larger problem sizes and real-time control. By improving computational efficiency, we aim to advance soft robotics research and facilitate more detailed, dynamic simulations.
Keywords
Soft Body Simulation, high-performance computing, GPU programming, Parallel Computing, Finite Element Method (FEM), Multiphysics Simulation
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Katzschmann Robert, Prof. Dr. , Mekkattu Manuel
Topics Information, Computing and Communication Sciences , Engineering and Technology
Advancing Soft Robot Modeling: Integrating Physics, Optimization, and Control

We are advancing soft robot simulation with FEM and energy-based methods to model complex, adaptive behaviors. This research entails developing the framework to support diverse designs, integrate new physics models, and optimize performance, enabling enhanced control and real-world applications of soft robots.
Keywords
Soft Robotics, Finite Element Method (FEM), Physical Modeling, Benchmarking, Optimization, Multiphysics Simulation, Sim-to-Real
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Work Packages
Requirements
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-01-01 , Latest end: 2026-12-31
Organization Soft Robotics Lab
Hosts Mekkattu Manuel , Katzschmann Robert, Prof. Dr.
Topics Information, Computing and Communication Sciences , Engineering and Technology
Insights into the Cellular Bio-Interaction and Biological Effects of Metal–Organic Frameworks

Metal–Organic Frameworks (MOFs) are a versatile class of highly porous materials with tunable structural and functional properties, making them promising candidates for biomedical applications such as drug delivery, imaging, and theranostics.In this project, different MOFs will be synthesized using various metal nodes and organic linkers and their physicochemical properties will be investigated. Based on previous biocompatibility studies performed on different mammalian cell models (immune, epithelial, fibroblast, neural, and cancer cells), the project aims to gain deeper insights into the biological activity of selected MOFs. The interaction between MOFs and cells will be studied through cellular uptake experiments, cytotoxicity evaluation, and analysis of the molecular pathways involved in cell death.
Keywords
Metal-Organic Frameworks (MOFs), Biocompatibility assays, Material characterization techniques, SDS and WesternBlot analysis
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-11 , Earliest start: 2026-05-11 , Latest end: 2027-05-11
Organization Multiscale Robotics Lab
Hosts Accursi Martina
Topics Engineering and Technology , Chemistry , Biology
Fine-Tuning Multimodal Reasoning Models for Affordance and Manipulativity Prediction in Robotic Manipulation

This project investigates whether reasoning-oriented multimodal models such as Gemma 4 can be fine-tuned to predict task-relevant affordances and manipulability for robotic manipulation. Given visual observations and high-level instructions, the model will identify actionable object parts, infer their functional suitability, and estimate how effectively a robot can interact with them using its own embodiment. Predictions may include affordance classes, contact regions, or manipulability scores learned from demonstrations, simulation, or robot execution data. These outputs will support interaction selection directly or guide downstream planners and control policies. The approach will be evaluated in simulation and on real robotic platforms to improve task-aware manipulation success in unstructured environments.
Keywords
affordance prediction; robotic manipulation; manipulability; multimodal reasoning; vision-language models; task-aware interaction; object part affordances; embodied AI; contact region prediction; motion planning; robot learning; high-level instruction understanding
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-10 , Earliest start: 2026-05-06 , Latest end: 2027-04-08
Applications limited to ETH Zurich , University of Zurich
Organization Robotic Systems Lab
Hosts Zurbrügg René , Werner Lennart
Topics Engineering and Technology
Automated calibration of body-scale contact sensors

Goal: Create a repeatable, precise, and high-throughput robotic experimental setup for characterizing a custom contact sensor. This project is part of a broader effort to enable robots to better perceive whole-body contact and execute dynamic, contact-rich tasks.
Keywords
Robotics, Tactile Sensing, Machine Learning, Automated Calibration, RL, AI, Mechanical Engineering, Manipulation
Labels
Semester Project
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-05-07 , Earliest start: 2026-05-11 , Latest end: 2026-12-31
Applications limited to ETH Zurich
Organization Robotic Systems Lab
Hosts Baines Robert , Cramariuc Andrei
Topics Information, Computing and Communication Sciences , Engineering and Technology
Silver Nanoparticle-Based Platforms for Thermal Modulation and Glucose Sensing in Engineered Muscle Tissues

This project aims to develop silver nanoparticle-based systems as multifunctional, responsive materials for engineered skeletal muscle tissues. The work will explore their use in localized thermal modulation of cellular activity and as embedded sensors for glucose monitoring within tissue constructs. By integrating nanomaterials with biofabricated muscle systems, the project seeks to create advanced platforms for controlled stimulation and real-time metabolic sensing.
Keywords
silver nanoparticles, nanomaterials, thermal modulation, glucose sensing, skeletal muscle tissue, biofabrication, biosensors, nanomedicine, tissue engineering, bio-hybrid systems.
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-06 , Earliest start: 2026-05-06 , Latest end: 2026-10-31
Organization Soft Robotics Lab
Hosts Filippi Miriam
Topics Medical and Health Sciences , Biology
Programmable Colloidal Crystal Engineering of Magnetoelectric Nanoparticles via DNA Origami

MENPs are an emerging class of multifunctional nanomaterials that exhibit coupled magnetic and electric properties. In this project, MENPs will be synthesized and functionalized with DNA strands to act as programmable building for colloidal crystal assembly. This approach adapts recent advances in DNA-mediated nanoparticle self-assembly, replacing metal–organic frameworks (MOFs) with MENPs to explore new functionalities. Their structural organization will be characterized, and their functional behavior will be investigated. Particular attention will be given to how the intrinsic magnetoelectric properties of MENPs influence collective properties in the assembled state. The project aims to provide insight into the relationship between nanoparticle design, assembly architecture, and emergent material properties, potentially enabling applications in catalysis, sensing, and responsive materials.
Keywords
Magnetoelectric Nanoparticles, Cobalt Ferrite, Barium Titanate,Surface engineering, DNA-programmed colloidal crystals
Labels
Semester Project , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-05-06 , Earliest start: 2026-06-01 , Latest end: 2027-05-01
Organization Multiscale Robotics Lab
Hosts Accursi Martina
Topics Engineering and Technology
Encasing Bio-actuators for Real-World Usability of Bio-hybrid Robots

This project aims to develop 3D muscle bioactuators integrated with smart protective encasing systems for operation beyond standard in vitro conditions. Building on existing platforms for thermal regulation and nutrient supply, the project will focus on designing responsive encapsulation strategies capable of adapting to environmental cues, such as pH variations, to regulate exchange with the surroundings. These systems will enable more robust, functional bioactuators for applications in bio-hybrid robotics and translational bioengineering.
Keywords
skeletal muscle, bioactuators, bio-hybrid robotics, stimuli-responsive biomaterials, encapsulation systems, chitosan, pH-responsive materials, biofabrication, tissue engineering
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
More information
Published since: 2026-05-06 , Earliest start: 2026-05-06 , Latest end: 2026-10-31
Organization Soft Robotics Lab
Hosts Filippi Miriam
Topics Engineering and Technology , Biology
Development of Sustainable Polymer-Based Coatings for Corrosion Protection
Corrosion protection remains a key challenge in high-performance industries such as aerospace, where conventional coating systems often rely on environmentally critical substances that are increasingly restricted. This thesis focuses on the development of a novel, sustainable polymer-based coating system as an alternative to existing technologies. The project combines polymer synthesis, material design, and coating engineering, with a strong emphasis on industrial applicability and scalability. The goal is to develop and tailor a novel polymer system for corrosion protection on aluminum alloys (e.g., AA2024). This includes controlled synthesis and modification of the material, followed by formulation and processing into coatings. Key performance targets include mechanical robustness, adhesion, and long-term corrosion resistance under relevant conditions. The project is research-driven, while being closely aligned with real industrial requirements and application scenarios, offering direct insight into the translation of materials from lab to application.
Labels
Semester Project , Master Thesis , ETH Zurich (ETHZ)
Description
Contact Details
More information
Published since: 2026-04-29 , Earliest start: 2026-06-01
Organization Multifunctional Materials
Hosts Yu Yingying
Topics Engineering and Technology , Chemistry
Spatial Proteomics of Mechanically-Driven Bone Healing

Bone healing is profoundly influenced by its mechanical environment. Advances in spatial proteomics now allow us to map protein expression within intact tissue and directly relate it to local biomechanical cues. The Laboratory for Bone Biomechanics is developing a new line of research within spatial mechanomics (DOI: 10.1126/sciadv.adp8496), integrating spatially resolved proteomic data with in silico models of the mechanical environment at fracture sites. This approach enables us to investigate, at cellular resolution, how mechanical forces shape protein-level signalling during bone repair.
Keywords
Bone, Mechanobiology, Spatial Proteomics, Protein Expression, Aging, Sex Differences, Mechanical Loading, Finite Element Modelling, Image Analysis
Labels
Semester Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-04-28 , Earliest start: 2026-01-01 , Latest end: 2027-08-31
Organization Müller Group / Laboratory for Bone Biomechanics
Hosts Mathavan Neashan
Topics Medical and Health Sciences , Engineering and Technology , Biology
Electrical Engineering Student (Part-time / Flexible) – Point-of-Care Diagnostics Hardware & Firmware
Diaxxo, an ETH Zürich spin-off, is looking for an Electrical Engineering student to support the development of electronics and embedded systems for diaxxoCare, an automated Point-of-Care PCR platform for decentralized molecular diagnostics. The project will involve high-level system design, PCB development or adaptation, electronics integration, bring-up and testing, and embedded firmware implementation for sensors, actuators, and device-level checkpoints. The student will work on a real commercial device, contributing to a practical solution that can be rapidly integrated into Diaxxo’s product development roadmap.
Keywords
Electrical Engineering, Embedded Systems, PCB Design, KiCad, Firmware, Motor Control, Sensors, Electronics Bring-up, Linux, Point-of-Care, PCR Diagnostics, Prototyping
Labels
Semester Project , Internship , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-04-24 , Earliest start: 2026-06-01 , Latest end: 2026-12-31
Organization Functional Materials Laboratory
Hosts Gregorini Michele
Topics Engineering and Technology
Engineering of a Smart Consumable-Check Module (prototype, hardware, firmware) for innovative diagnostic devices
DiaxxoCare is a Point-of-Care PCR platform designed for professional use in decentralized and resource-limited settings, where robustness against user mistakes is essential. This project develops an implementation-ready checkpoint system that detects missing or incorrectly placed consumables and unsafe device states (e.g., door/lid not closed), guides the user to recover via the UI, and blocks or pauses the workflow when required conditions are not met. The work includes sensor/actuator selection, firmware/software logic, prototype integration, and validation testing to enable fast deployment on commercial devices.
Keywords
Point-of-Care diagnostics; consumable detection; sensors; actuators; embedded systems; firmware; interlocks; human factors; prototyping; verification & validation; medical/veterinary devices; diaxxoCare
Labels
Semester Project , Course Project , Internship , Bachelor Thesis , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-04-24 , Earliest start: 2026-01-01 , Latest end: 2026-08-31
Organization Functional Materials Laboratory
Hosts Gregorini Michele
Topics Engineering and Technology
Reduced-Order Modeling for Density-Based Topology Optimization
This Master's Thesis opportunity is jointly offered by the Chair of Structural Mechanics & Monitoring at ETH Zürich (Prof. Dr. Eleni Chatzi) and by the Group of Engineering Dynamics at ETH Zürich (Dr. Paolo Tiso). Topology optimization is a powerful tool for determining optimal material distribution, but its iterative nature leads to high computational costs, especially for large-scale problems. On the other hand, its high-dimensional design space poses unique challenges to apply conventional reduced-order modeling techniques. This thesis investigates methodologies to tackle these challenges, thus providing a framework for accelerated topology optimization routines.
Keywords
Reduced-Order Modeling, topology optimization, surrogate models, machine learning
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-04-18 , Earliest start: 2026-07-01 , Latest end: 2026-12-31
Organization Structural Mechanics (Prof. Chatzi)
Hosts Chatzi Eleni , Betti Federico , Tiso Paolo
Topics Mathematical Sciences , Engineering and Technology
PDMS-Based Bioreactor Investigating Cell Behavior in Response to Hydrostatic Pressure and Substrate Stiffness

Introduction and Background Skin cells dynamically respond to mechanical and biochemical stimuli, which influence critical processes such as proliferation, differentiation, and migration. By understanding this interplay, mechanical and biochemical stimuli may be used in the future to facilitate the growth of skin patches, tissue formation, and organ regeneration, enabling new therapies and benefiting patients. The study of these responses, mechanobiology, requires advanced in-vitro systems to emulate physiological conditions. This project utilizes a device designed for controlled manipulation of hydrostatic pressure (0.1–1.5 kPa) and substrate stiffness (0.1–100 kPa). The system facilitates isolated and scalable experiments to analyze how the interplay of these mechanical parameters affects cell behavior. In this thesis, the student will use this system to investigate how different stimuli affect cell behavior.
Keywords
Bioreactor, tissue engineering, organ regeneration
Labels
Master Thesis
Description
Goal
Contact Details
More information
Published since: 2026-04-15 , Earliest start: 2026-06-01 , Latest end: 2027-01-31
Organization Macromolecular Engineering Laboratory
Hosts Cuni Filippo
Topics Engineering and Technology , Biology
Software Development: Enabling In Vitro Neuroscience Research
This project focuses on developing software for advanced neural interfaces used in in vitro studies. These interfaces enable precise exploration of neural activity, providing critical insights into neuronal dynamics, drug interactions, and neurological disorders. The project involves creating and optimizing software for data acquisition, analysis, and visualization, which directly enhances the usability and impact of these tools in research and healthcare applications. Ideal candidates will possess strong programming skills in Python. This project is available as Master thesis or semester project.
Keywords
Software development; Neural Interfaces; Neuroscience; Python; Biomedical Research; Neuroengineering; Neurotechnology.
Labels
Semester Project , Internship , Master Thesis
Description
Contact Details
More information
Published since: 2026-03-10 , Earliest start: 2026-04-01
Organization Bio Engineering Laboratory
Hosts Cardes Fernando
Topics Information, Computing and Communication Sciences
Master Thesis: Autonomous Robotic Cardiac Catheters - Project Abroad at Boston Children's Hospital, Harvard Medical School

We are developing advanced robotic catheter systems to enable precise heart valve repair and the treatment of cardiac arrhythmias. Robotic platforms have the potential to shorten the learning curve for complex beating‑heart procedures and provide a foundation for introducing autonomous functionality. Key elements of this work include the development of autonomous control strategies, integration of therapeutic devices, and comprehensive testing in anatomical and preclinical animal models. Preferred skill sets include experience in robotics, machine learning, control systems, and prototyping.
Keywords
robotic cardiac catheters,valve repair, robotic treatment of arrythmia
Labels
Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
More information
Published since: 2026-02-26 , Earliest start: 2026-04-01 , Latest end: 2027-06-01
Organization Multiscale Robotics Lab
Hosts Gantenbein Valentin
Topics Medical and Health Sciences , Engineering and Technology